
1. Combinación de componentes
En electrónica y radio, los componentes se pueden conectar conformando un circuito. Como ya vimos, estas conexiones pueden ser en serie, en paralelo o mixtas. La manera en la que los componentes se conectan tiene repercusiones en cómo se comportan la tensión, la corriente y la resistencia, incluyendo la inductancia en el caso de las bobinas.
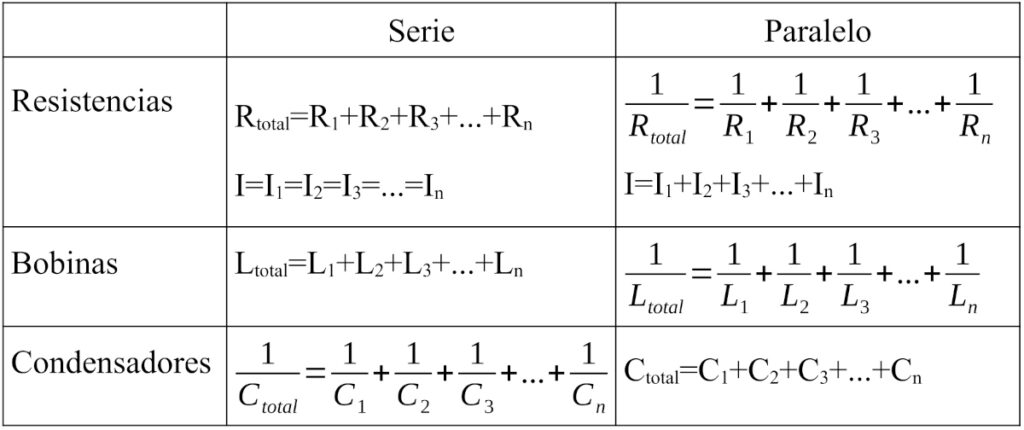
En este esquema básico podemos ver algunos de los comportamientos básicos que suceden en ambos tipos de circuitos. Las resistencias se comportan de diferente manera. En serie, la resistencia total es el producto de la suma de las resistencias, mientras que en paralelo, la resistencia total va a ser menor que la de cada una de ellas. En cambio, la corriente permanece inalterada cuando está en serie (es igual en cada componente) y en paralelo, se divide en función del valor de los componentes, es decir, que en la corriente total es igual a la suma de las corrientes parciales. En las bobinas, lo que vemos es la inductancia (L), ésta se conforma de manera análoga a las resistencias. Recordemos que la inductancia es la propiedad de la bobina de oponerse al paso de corriente. Los condensadores se comportan de manera opuesta a las resistencias.
Otro de los componentes que debemos mencionar son los diodos. Cuando están en serie, las tensiones directas se suman, pero no se recomienda su uso en paralelo ya que no comparten corriente de manera equilibrada. Cuando se usan en paralelo, se suelen acompañar de resistencias en serie que ayuden a equilibrar dichas corrientes.
- Comportamientos en altas frecuencias
En altas frecuencias (HF, VHF, UHF), se producen unas variaciones en cómo se comportan estos componentes. Por ejemplo, las resistencias presentan inductancias parasitarias (en terminales) y aumenta la reactancia, afectando al comportamiento de las resistencias. En las bobinas, la resistencia aumenta por efecto pelicular y la inductancia equivalente puede ser negativa, comportándose como un condensador. El núcleo puede presentar pérdidas. Es importante tener en cuenta que las bobinas tienen una frecuencia de resonancia, alterándose su comportamiento fuera de esa frecuencia. Los condensadores, por otra parte, presentan autoinductancia y a partir de cierta frecuencia, pueden comportarse como bobinas.
2. Filtros
Los filtros son circuitos que permiten dejar unas ciertas frecuencias, bloqueando otras. En radio son indispensables ya que permiten seleccionar señales deseadas y bloquear el resto, consideradas interferencias. Para la construcción de filtros, es necesario que se acoplen diferentes circuitos, es decir, que la tensión o corriente de uno, produzca tensión o corriente en otro. Hay muchas formas de acoplar circuitos, pero los que vamos a ver a continuación son los filtros y las redes en escalera.
2.1 Redes en escalera
Son redes formadas por una red de inductancias y condensadores que pueden estar conectadas tanto en serie como en paralelo. Pueden incluir resistencias, pero cuando no las tienen o su valor es mínimo se llaman redes no disipativas (porque no consumen potencia). Para entender el funcionamiento de los filtros debemos recordar que los siguientes fenómenos que relacionan la frecuencia con la reactancia en condensadores y bobinas.

Los condensadores tienen una reactancia capacitiva (negativa) y la bobina una reactancia inductiva (positiva). Ambas se anulan. Teniendo en cuenta cómo se comporta la frecuencia y el factor de calidad, junto lo dicho en apartados anteriores, podemos presentar la siguiente fórmula:

Esto nos dice varias cosas. Debemos recordar que el factor de calidad Q expresa la relación entre frecuencia de resonancia y su ancho de banda (B). La primera expresión es la que se corresponde con circuitos en serie, mientras que la segunda es la que aparece en circuitos en paralelo. En este sentido Q representa la facultad que tiene un circuito para seleccionar una frecuencia (eliminando el resto). Cuanto mayor es el valor de Q, más aguda será la curva de resonancia, algo necesario para altas frecuencias.
2.2 Filtros
Filtros. Son redes que permiten el paso de determinadas frecuencias mientras que bloquean otras (bandas). Un filtro es en realidad un circuito con al menos un elemento reactivo (bobina o condensador). Según el número de componentes será de primer orden, de segundo orden… Los filtros se pueden clasificar según qué componente usa o según qué filtros usa. No obstante, lo importante en el filtro es la banda o conjunto de frecuencias que bloquea.
Según el tipo de filtros:
– Filtros pasivos: Están formados por combinaciones (en serie o en paralelo) de elementos pasivos tales como resistencias, bobinas o condensadores.
– Filtros activos: Además de los componentes pasivos, añaden algún componente activo (amplificadores o transistores).
Según el filtro:
– Paso alto: Permiten el paso de frecuencias a partir de un determinado punto. Es decir, de esa frecuencia hacia arriba.
– Paso bajo: Permiten el paso de frecuencias bajas, es decir, desde cero hasta una determinada frecuencia. Las que son superiores, son bloqueadas.
– Paso de banda y supresión de banda: Ambas trabajan sobre un rango de frecuencias determinadas. La primera permite el paso exclusivo de esa banda mientras que la segunda la bloquea. El paso de banda es una combinación de los dos filtros anteriores.
Ancho de banda de un filtro. Es la anchura del rango de frecuencias en el que se concentra la mayor parte de la potencia de la señal. Se mide en hercios (Hz). Para calcular el ancho de banda se usa el análisis de Fourier.
Respuesta en frecuencias. Para cada filtro existen dos zonas. La banda de paso y la banda de atenuación. En la primera, es cuando las bandas pasan con su valor máximo (o hasta con un 50% de valor), mientras que en la segunda, el valor disminuye hasta el bloqueo.
Efectos debido a comportamientos reales. Hay que tener en cuenta que una cosa es cómo se comportan los componentes de manera ideal y otra es cómo lo hacen realmente en un circuito bajo ciertas condiciones externas.
-
Ejemplos de filtro
– Filtro en PI. Se llama porque su configuración se parece a la letra griega Π. Tiene 1 brazo en serie y 2 en paralelo.
– Filtro en T. Su forma es en T. Tiene 1 brazo en serie y 1 en paralelo.
– Filtro de cristal de cuarzo. El cuarzo tiene propiedades especiales que permiten que sea usado como componente de control de la frecuencia. Convierte las vibraciones mecánicas en voltajes eléctricos a una frecuencia específica. Los filtros de cristal de cuarzo tienen una calidad Q más elevada que el resto.
– Filtros digitales. Están implementados mediante procesadores DSP. Dos ejemplos son los FIR (Finite Impulse Response) y los IIR (Infinite Impulse Response). Los FIR tienen una respuesta finita y son más estables. Los IIR ofrecen una respuesta infinita, son más eficientes, pero pueden resultan inestables.
3. Fuentes de alimentación
Una fuente de alimentación es un dispositivo que convierte la corriente alterna (CA) en corriente continua (CC). Se pueden clasificar según la salida o según la tecnología que emplean. Según la salida, de acuerdo a la tensión, pueden ser fijas, ajustables o programables. También pueden tener una salida (simples) o varias (múltiples). Según la tecnología, las fuentes pueden ser lineales o conmutadas. Las lineales son las fuentes convencionales. Trabajan en régimen lineal y tienen buena regulación; trabajan en tres etapas (entrada, regulación y salida). Las conmutadas trabajan en régimen de conmutación. Obtienen un mejor rendimiento, además de ser fuentes más pequeñas y de menor coste.
El transformador adapta los niveles de tensión y proporciona aislamiento. El rectificador es el circuito que convierte la CA en CC. La regulación se consigue mediante algún componente disipativo (conmutador, circuito electrónico…) y a través del filtro, se trata de eliminar el rizado que se produce al pasar a la corriente continua.
-
Circuitos de rectifiación
Un rectificador es lo que permite obtener corriente continua. Normalmente hace uso de diodos. Los rectificadores pueden ser de tres tipos.
Rectificador de media onda. Cuando sólo se utiliza uno de los dos semiciclos de la corriente alterna. Este rectificador emplea un único diodo. A la salida, sólo alcanza una mitad de la forma de onda de la entrada (puede ser la mitad positiva o negativa).
Rectificador de onda completa. Convierte la totalidad de la forma de onda de entrada (onda completa) en una polaridad constante (positiva o negativa) mediante la inversión de las porciones o semiciclos. De esta manera, se consigue una sóla onda de salida positiva o negativa.
Rectificador en puente. Es un rectificador de onda completa. Es como el anterior, pero no necesita un transformador con toma central en el secundario.
-
Circuitos de filtrado
En los sistemas de rectificación, se produce una corriente continua que presenta pulsaciones. Muchos dispositivos deben evitar este tipo de rizado y por eso se usan circuitos de filtrado que reducen el rizado. Normalmente se consigue mediante circuitos de filtro en forma de PI, con un condensador, bobina con alta inductancia y poca resistencia (para evitar caída de tensión) y un segundo condensador. Los condensadores se cargan al valor máximo de tensión entrada por el rectificador y se descargan cuando la pulsación desaparece, provocando una corrección del rizado a su salida.
-
Circuitos de estabilización
Muchas veces se producen cambios de tensión (alrededor del 20%). Por ello se usan circuitos de estabilización que tratan de garantizar que la tensión se mantenga estable. Hay dos técnicas conocidas. Las fuentes estabilizadas consiguen estabilización utilizando directamente la característica no lineal de un dispositivo electrónico. Las fuentes reguladas, por otro lado, lo consiguen mediante un sistema de control o realimentación.
-
Fuentes de alimentación conmutadas
Las fuentes de alimentación conmutadas son muy sadas hoy en día en sustitución de las fuentes de alimentación lineales. Son básicamente convertidores de CA a CC con un rectificador a la entrada.
Tienen un filtro EMC que reduce los ruidos e interferencias de la red, un puente rectificador que rectifica la CA, un corrector del factor de potencia que corrige el desfase, un condensador que amortigua la corriente pulsante para que mantenga un valor constante, un transistor que permite cortar y activar el paso de corriente para convertir la corriente continua en pulsante, un transformador que reduce la tensión, un rectificador (generalmente un diodo) que convierte la CA a pulsante, un filtro que convierte la corriente pulsante en continua. El transistor está conectado a un controlador PWM que activa y desactiva el circuito, protegiéndolo además de sobrecargas y cortocircuitos. También cuentan con un optoacoplador que conecta la salida de la fuente con el controlador.
4. Amplificadores
Un amplificador es un dispositivo que amplía la señal. Es decir, entrega una señal con mayor amplitud que la que recibe, todo ello sin modificar (sensiblemente) la forma de onda. Los transistores pueden funcionar como amplificadores cuando incrementan la tensión (V) o la corriente (I), pues con ello se incrementa la potencia.
Amplificadores de tensión o corriente. Hay amplificadores que elevan la tensión a la salida y otros que amplifican la corriente.
Polarización. Consiste en fijar tensiones e intensidades de señal a la salida para que el dispositivo opere en un punto de trabajo concreto. Es decir, fija las corrientes o tensiones.
Corriente y tensión (en reposo). En amplificadores, son la corriente y la tensión cuando no hay señal de entrada, es decir, cuando el sistema está en reposo.
Punto de trabajo. Representa las condiciones de reposo.
Cuando se polariza un transistor, se fija la forma de trabajo. El transistor se puede situar dentro de tres zonas de trabajo:
– Zona de corte. No circula corriente por la base. Por lo tanto, la corriente del colector y el emisor también es nula.
– Zona de saturación. Por la base circula corriente. Por tanto, hay un incremento de la corriente en el colector (entre colector-emisor). Se comporta como un interruptor cerrado.
– Zona activa. Es cuando actúa como amplificador, permitiendo pasar la corriente.
-
Tipos de circuitos (según polarización)
Clase A. Es el más lineal, aunque su rendimiento es bajo. Potencia aplicada 20-30%.
Clase B. Linealidad baja. Están diseñados para alcanzar la máxima potencia de salida. Rendimiento 60-65%.
Clase AB. Combinan A y B. Es menos lineal que A. La corriente de salida circula entre medio ciclo y ciclo completo. Hay una pequeña distorsión. Rendimiento del 50%.
Clase C. Lineal deficiente. Corriente de salida circula durante menos de medio ciclo de la señal de entrada. Eso provoca gran distorsión, aunque su rendimiento puede alcanzar el 85%.
Clase D. Niveles de distorsión semejantes a AB. Rendimiento alto, incluso al 95%.
-
Amplificadores de LF y HF
Para los amplificadores de bajas frecuencias (LF), lo importante es que no aparezcan distorsiones. Se suelen usar amplificadores de tipo D, aunque los de alta gama suelen emplear los A. Entre los equipos de radio, es común ver AB.
Para los amplificadores de altas frecuencias (HF), los amplificadores tienen circuitos sintonizantes, ya que los elementos del circuito deben resonan a la frecuencia que se debe amplificar. Por ello tienen circuitos resonantes tanto a la entrada como a la salida. Esto implica la ampliación a una sola frecuencia, la deseada. Para FM y CW se usan los de clase C; para AM se suelen emplear los AB o los B.
Amplificador en contrafase (push-pull). Es un tipo de amplificador de potencia útil para ambos casos.
Ganancia. La ganancia es el efecto amplificador. Puede referirse a la tensión o a la corriente [1]. Lo contrario de la ganancia es la atenuación. La ganancia de potencia expresa la relación entre la potencia de salida y la de entrada. Se expresa en decibelios (dB), un múltiplo del belio. Hay que remarcar que la relación expresada entre las dos magnitudes no es directa sino logarítmica. Es decir, se usa un logaritmo en este caso para representar el nivel de ganancia. Ligado a esto, está la eficacia. Un circuito será más eficaz cuando más alta sea la ganancia.

Armónicos y distorsión por intermodulación. Cuando hay una variación en la tensión o la corriente, se produce un campo electromagnético que puede afectar al funcionamiento del equipo. Los armónicos son producidos por circuitos no lineales. Dependiendo de la tensión, pueden llegar a un punto de saturación. Ahí la onda se deforma y puede producir armónicos. La distorsión por intermodulación (IMD) es la interferencia que se produce cuando dos o más señales atraviesan un sistema no lineal a la vez.
5. Detectores/demoduladores
Los detectores (también llamados demoduladores), son dispositivos que permiten recuperar información de una onda portadora modulada. Pueden ser demoduladores asíncronos cuando requieren de una portadora sincronizada con el transmisor, es decir, que son un simple dispositivo que deteca la envolvente de la señal modulada. Los demuladores síncronos requieren una portadora soncronizada con la portadora del emisor. Por eso, son aparatos más costosos y complejos.
6. Osciladores
Un oscilador es un circuito electrónico que produce una señal eléctrica repetitiva. Según la señal, el oscilador es armónico (produce ondas senoidales) o de relajación (ondas no senoidales como ondas cuadradas u ondas con forma de dientes de sierra). Cuando una espira gira alrededor de su eje, se produce un campo magnético que produce una corriente eléctrica inducida en los terminales de la espira.
-
Realimentación
Los circuitos inductivos (o capacitivos) tienen la propiedad de almancenar energía y liberarla cuando la descarga termina. El proceso de realimentación consiste en tomar una parte de la señal de salida y meterla de nuevo en la señal de entrada. La realimentación puede ser positiva (si la señal está en fase) o negativa (si está en contrafase). La negativa se usa en amplificadores para mejorar la estabilidad.
El transistor suele funcionar como oscilador. Además del transistor, sólo se necesita de un circuito oscilante que oscile a la frecuencia deseada y un circuito de realimentación. Si variamos algunos de los elementos, obtenemos un OFV, un oscilador de frecuencia variable. Uno de los más conocidos es el oscilador del puente Wien. Es un amplificador clase A, con un condensador en el emisor y una red de alimentación. La señal de salida en su transcurso, cambia de fase y realimenta la entrada positivamente, provocando una oscilación.
-
Oscilador LC
Tiene una red de alimentación formada por una bobina y un condensador en paralelo. El primero almacena energía en forma de campo magnético y el segundo, en forma de carga eléctrica. El condensador se va descargando y cuando cesa, queda cargado en sentido opuesto (recordemos que el condensador está conformado por dos placas conductoras separadsa por un dieléctrico). Entonces se produce el mismo proceso, pero en sentido contrario, siempre y cuando cuente con un generador exterior que suministre la energía necesaria, ya que se producen pérdidas.
-
Oscilador de cristal
Lleva un cristal de cuarzo como estabilizador de la frecuencia. La frecuencia deseada exigirá que el cristal esté cortado a un determinado grosor. Cuando más delgado es, más alta es la frecuencia de resonancia.
-
Oscilador VCO
También llamado Voltage-Controlled Oscillator, el VCO es un oscilador controlado por tensión. Produce una señal de frecuencia proporcional a la tensión. De esta manera, se puede manipular la tensión para provocar cambios de frecuencia. Es oscilador VCO más común emplea diodo varipac, aunque hay otras combinaciones de componentes. Los VCO se usan en señales FM y también como parte de los bucles de enganche de fase (PLL) que veremos a continuación.
7. Circuitos sintetizadores de frecuencia (PLL)
El PLL (Phase-Looked Loop), llamado también bucle enganchado en fase, es un sistema de realimentación que tiene un detector de fase (compara la fase del VCO con la referencia), un filtro de paso bajo (determina el tipo de PLL y sus características) y un oscilador controlado por tensión (VCO) en el camino de la realimentación. El VCO tiene como salida una señal de frecuencia porporcional a la tensión de entrada. En el camino de realimentación, entre el VCO y el detector de fase, hay un divisor de frecuencia. Se usa para tener una frecuencia múltiplo de la frecuencia de entrada. Por eso mismo, estos PLL son llamados también circuitos sintonizadores de frecuencia. Lo que busca este dispositivo es detectar las frecuencias de entrada y tratar de igualarlas en la salida.
8. Circuitos con procesadores digitales de señal (DSP)
Aquí entran en juego los ya mencionados filtros digitales (FIR, IIR). También hay que tener en cuenta que existen toda una serie de circuidos DSP, desde moduladores y demoduladores digitales hasta sistemas de ecualización automática.
Los PLL suelen producir distorsiones o ruidos de fase. Por ello, se suelen utilizar los sistemas DDS (Direct Digital Synthesis) o sistema de síntesis digital directa. Son dispositivos muy complejos, basados en circuitos integrados que construyen matemáticamente la señal, valor por valor, para tratar de corregir esa distorsión o ruido de fase.
[1] Es importante explicar que al referirnos a la ganancia en potencia, hablamos de dBW (decibelios vatios) o dBm (decibelios milivatios). Se toma como referencia 1W. No obstante, cuando hablamos de tensión, usamos dBu y se toma como referencia 0,7746V.